I was trying to make sense of tensor products; here are some notes on the topic.
As multilinear maps
Let $(V, +, \cdot)$ be a vector space. Let $r$, $s$ be nonnegative integers. An $(r, s)$-tensor over $V$ - let us call it $T$ - is a multilinear map [1], [2], [3]
$$T:\underbrace{V^* \times \ldots \times V^*}_{r \text{ times}} \times \underbrace{V \times \ldots \times V}_{s \text{ times}} \to {\rm I\!R},$$
where $V^*$ is the dual vector space of $V$ - the space of covectors.
Before we explain what multilinearity is let's give an example.
Let's say $T$ is a $(1, 1)$-tensor. Then $T: V^* \times V \to {\rm I\!R}$, that is $T$ takes a covector and a vector and multilinearity means that for two covectors $\phi, \psi\in V^*$,
$$T(\phi+\psi, v) = T(\phi, v) + T(\psi, v),$$
and
$$T(\lambda \phi, v) = \lambda T(\phi, v),$$
for all $v\in V$, and it is also linear in the second argument, that is,
$$T(\phi, v+w) = T(\phi, v) + T(\phi, w),$$
and
$$T(\phi, \lambda v) = \lambda T(\phi, v).$$
Using these properties twice we can see that
$$T(\phi+\psi, v+w) = T(\phi, v) + T(\phi, w) + T(\psi, v) + T(\psi, w).$$
Example: A $(0, 2)$-tensor. Let us denote the set of polynomials with real coefficients is denoted by $\mathsf{P}$. Define the map
$$g: (p, q) \mapsto g(p, q) \coloneqq \int_0^1 p(x)q(x){\rm d}x.$$
Then this is a $(0, 2)$-tensor,
$$g: \mathsf{P} \times \mathsf{P} \to {\rm I\!R},$$
and multilinearity is easy to check.
It becomes evident that an inner product is a $(0, 2)$-tensor. More precisely, an inner product is a bilinear symmetric positive definite operator $V\times V \to {\rm I\!R}$.
Example: Covectors as tensors. It is easy to see that covectors, $\phi: V\to {\rm I\!R}$ are $(0, 1)$-tensors. Trivially.
Example: Vectors as tensors. Given a vector $v\in V$ we can consider the mapping
$$T_v: V^* \ni \phi \mapsto T_v(\phi) = \phi(v) \in {\rm I\!R}.$$
This makes $T_v$ into a $(1, 0)$-tensor.
Example: linear maps as tensors. We can see a linear map $\phi \in {\rm Hom}(V, V)$ as a $(1,1)$-tensor
$$T_\phi: V^* \times V \ni (\psi, v) \mapsto T_\phi(\psi, v) = \psi(\phi(v)) \in {\rm I\!R}.$$
Components of a tensor
Let $T$ be an $(r, s)$-tensor over a finite-dimensional vector space $V$ and let $\{e_i\}_i$ be a basis for $V$. Let the dual basis, for $V^*$, be $\{\epsilon^i\}_i$. The two bases have the same cardinality. Then define the $(r+s)^{\dim V}$ many numbers
$$T^{i_1, \ldots, i_r}_{j_1, \ldots, j_s} = T(\epsilon^{i_1}, \ldots, \epsilon^{i_r}, e_{j_1}, \ldots, e_{j_s}).$$
These are the components of $T$ with respect to the given basis.
This allows us to conceptualise a tensor as a multidimensional (multi-indexed) array. But maybe we shouldn’t… This is as bad as treating vectors as sequences of numbers, or matrices as “tables” instead of elements of a vector space and linear maps respectively.
Let's see how exactly this works via an example [4]. Indeed, consider an $(2,3)$-tensor of the tensor space $\mathcal{T}^{2}_{3} = V^{\otimes 2} \otimes (V^*)^{\otimes 3}$ , which can be seen as a multilinear map
$$T:V^*\times V^*\times V \times V \times V \to {\rm I\!R}.$$
Yes, we have two $V^*$ and three $V$!
Take a basis $(e_i)_i$ of $V$ and a basis $(\theta^j)_j$ of $V^*$. Let us start with an example using a pure tensor of the form $e_{i_1}\otimes e_{i_2} \otimes e_{i_3} \otimes \theta^{j_1} \otimes \theta^{j_2},$ for some indices $i_1,i_2,i_3$ ,and $j_1, j_2$. This can be seen as a map $V^*\times V^*\times V \times V \times V \to {\rm I\!R}$, which is defined as
$$\begin{aligned}(\theta^{j_1} \otimes \theta^{j_2} \otimes e_{i_1}\otimes e_{i_2} \otimes e_{i_3}) (\bar{e}_1, \bar{e}_2, \bar{\theta}^1, \bar{\theta}^2, \bar{\theta}^3) \\ {}={} \langle \theta^{j_1}, \bar{e}_1\rangle \langle \theta^{j_2}, \bar{e}_2\rangle \langle e_{i_1}, \bar{\theta}^1\rangle \langle e_{i_2}, \bar{\theta}^2\rangle \langle e_{i_3}, \bar{\theta}^3\rangle,\end{aligned}$$
where $\langle {}\cdot{}, {}\cdot{}\rangle$ is the natural pairing between $V$ and its dual, so
$$\begin{aligned} (\theta^{j_1} \otimes \theta^{j_2} \otimes e_{i_1}\otimes e_{i_2} \otimes e_{i_3}) (\bar{e}_1, \bar{e}_2, \bar{\theta}^1, \bar{\theta}^2, \bar{\theta}^3) \\{}={} \theta^{j_1}(\bar{e}_1) \theta^{j_2}(\bar{e}_2) \bar{\theta}^1(e_{i_1}) \bar{\theta}^2(e_{i_2}) \bar{\theta}^3(e_{i_3}).\end{aligned}$$
More specifically, when the above tensor is applied to a basis vector $(e_{i_1'}, e_{i_2'}, \theta^{j_1'}, \theta^{j_2'}, \theta^{j_3'})$, then the result is
$$\begin{aligned} &(\theta^{j_1} \otimes \theta^{j_2} \otimes e_{i_1}\otimes e_{i_2} \otimes e_{i_3}) (e_{i_1'}, e_{i_2'}, \theta^{j_1'}, \theta^{j_2'}, \theta^{j_3'}) \\ {}={}& \theta^{j_1}(e_{i_1'}) \theta^{j_2}(e_{i_2'}) \theta^{j_1'}(e_{i_1}) \theta^{j_2'}(e_{i_2}) \theta^{j_3'}(e_{i_3}) \\ {}={}& \delta_{i_1' j_1} \delta_{i_2' j_2} \delta_{i_1 j_1'} \delta_{i_2 j_2'} \delta_{i_3 j_3'}. \end{aligned}$$
A general tensor of $\mathcal{T}^{2}_{3}$ has the form
$$T {}={} \sum_{ \substack{i_1, i_2, i_3 \\ j_1, j_2} } T_{j_1, j_2}^{i_1, i_2, i_3} (\theta^{j_1} \otimes \theta^{j_2} \otimes e_{i_1}\otimes e_{i_2} \otimes e_{i_3}),$$
for some parameters (components) $T_{j_1, j_2}^{i_1, i_2, i_3}$. This can be seen as a mapping $T:V^*\times V^* \times V^* \times V \times V \to {\rm I\!R}$ that acts on elements of the form
$$x {}={} \left( \sum_{j_1}a^1_{j_1}\theta^{j_1}, \sum_{j_2}a^2_{j_2}\theta^{j_2}, \sum_{j_3}a^3_{j_3}\theta^{j_3}, \sum_{i_1}b^1_{i_1}e_{i_1}, \sum_{i_2}b^1_{i_2}e_{i_2}, \sum_{i_3}b^1_{i_3}e_{i_3} \right),$$
and gives
$$\begin{aligned} Tx {}={}& \sum_{ \substack{i_1, i_2, i_3 \\ j_1, j_2} } T_{j_1, j_2}^{i_1, i_2, i_3} (e_{i_1}, e_{i_2}, e_{i_3}, \theta^{j_1}, \theta^{j_2})(x) \\ {}={}& \sum_{ \substack{i_1, i_2, i_3 \\ j_1, j_2} } T_{j_1, j_2}^{i_1, i_2, i_3} \left\langle e_{i_1}, \sum_{j_1'}a^1_{j_1'}\theta^{j_1'}\right\rangle \left\langle e_{i_2}, \sum_{j_2'}a^1_{j_2'}\theta^{j_2'}\right\rangle \\ &\qquad\qquad\qquad\left\langle e_{i_3}, \sum_{j_3'}a^1_{j_3'}\theta^{j_3'}\right\rangle \left\langle \theta_{j_1}, \sum_{i_1'}b^1_{i_1'}e^{i_1'}\right\rangle \left\langle \theta_{j_2}, \sum_{i_2'}b^2_{i_2'}e^{i_2'}\right\rangle \\ {}={}& \sum_{ \substack{i_1, i_2, i_3 \\ j_1, j_2} } T_{j_1, j_2}^{i_1, i_2, i_3} a^1_{i_1}a^2_{i_2}a^3_{i_3}b^1_{j_1}b^1_{j_2}. \end{aligned}$$
As a quotient on a huge space
Here we construct a huge vector space and apply a quotient to enforce the axioms we expect tensors and tensor products to have. This huge space is a space of functions sometimes referred to as the "formal product" [5]. See also this video [7].
We will define the tensor product of two vector spaces. Let $V, W$ be two vector spaces. We define a vector space $V*W$, which we will call the formal product of $V$ and $W$, as the linear space that has $V\times W$ as a Hamel basis. This space is also known as the free vector space, $V*W = {\rm Free}(V\times W)$.
To make this more concrete, we can identify $V*W$ by the space of functions $\varphi: V\times W \to {\rm I\!R}$ with finite support. Representatives (and a basis) for this set are the functions
$$\delta_{v, w}(x, y) {}={} \begin{cases} 1, & \text{ if } (x,y)=(v,w) \\ 0,& \text{ otherwise} \end{cases}$$
Indeed, every function $f:V\times W\to{\rm I\!R}$ with finite support (a function of $V*W$) can be written as a finite combination of such $\delta$ functions and each $\delta$ function is identified by a pair $(v,w)\in V\times W$.
Note that $V\times W$ is a vector space when equipped with the natural operations of function addition and scalar multiplication.
We consider the natural embedding, $\delta$, of $V\times W$ into $V*W$, which is naturally defined as
$$\delta:V\times W \ni (v_0, w_0) \mapsto \delta_{v_0, w_0} \in V * W.$$
Consider now the following subspace of $V*W$
$$M_0 {}={} \operatorname{span} \left\{ \begin{array}{l} \delta(v_1+v_2, w) - \delta(v_1, w) - \delta(v_2, w), \\ \delta(v, w_1+w_2) - \delta(v, w_1) - \delta(v, w_2), \\ \delta(\lambda v, w) - \lambda \delta(v, w), \\ \delta(v, \lambda w) - \lambda \delta(v, w), \\ v, v_1, v_2 \in V, w, w_1, w_2 \in W, \lambda \in {\rm I\!R} \end{array} \right\}$$
Quotient space definition of tensor space.
We define the tensor product of $V$ with $W$ as $$V\otimes W = \frac{V * W }{M_0}.$$ This is called the tensor space of $V$ with $W$ and its elements are called tensors.
This is the space we were looking for. Here's what we mean: we have already defined the mapping $\delta: V\times W \to V * W$. We also define the canonical embedding $\pi: V*W \to V \otimes M_0$. We then define the tensor product of $v\in V$ and $w\in W$ as
$$v\otimes w = (\pi {}\circ{} \delta)(v, w) = \delta_{v, w} {}+{} M_0.$$
It is a mapping $\otimes: V\times W \to V\otimes W$ and we can see that it is bilinear.
Properties of $\otimes$.
The operator $\otimes$ is bilinear.
Proof. For $v\in V$, $w\in W$ and $\lambda \in {\rm I\!R}$ we have
$$\begin{aligned} (\lambda v)\otimes w {}={}& \delta_{\lambda v, w} + M_0 \\ {}={}& \underbrace{\delta_{\lambda v, w} - \lambda \delta_{v, w}}_{\in{}M_0} + \lambda \delta_{v, w} + M_0 \\ {}={}& \lambda \delta_{v, w} + M_0 \\ {}={}& \lambda (\delta_{v, w} + M_0) \\ {}={}& \lambda (v\otimes w). \end{aligned}$$
Likewise, for $v_1, v_2 \in V$, $w\in W$, $\lambda \in {\rm I\!R}$,
$$\begin{aligned} (v_1 + v_2)\otimes w {}={}& \delta_{v_1+v_2, w} + M_0 \\ {}={}& \underbrace{\delta_{v_1+v_2, w} - \delta_{v_1, w} -\delta_{v_2, w}}_{\in {} M_0} + \delta_{v_1, w} + \delta_{v_2, w} + M_0 \\ {}={}& \delta_{v_1, w} + \delta_{v_2, w} + M_0 \\ {}={}& (\delta_{v_1, w} + M_0) + (\delta_{v_2, w} + M_0) \\ {}={}& v_1\otimes w + v_2 \otimes w \end{aligned}$$
The other properties are proved likewise. $\Box$
Universal property
Here's how I understand the universal property: Suppose we know that we have a function $f: V\times W \to{} ?$, which is bilinear. We can always think of the mysterious space $?$ as the tensor space $V\otimes W$ [5].
Let's look at Figure 1.
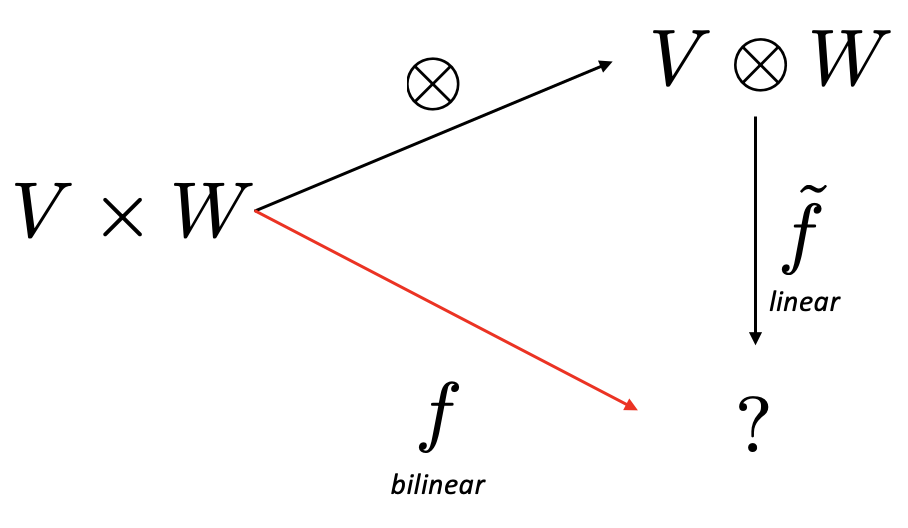
Figure 1. Universal property of tensor product.
There is a unique linear function $\tilde{f}:V\otimes W \to{} ?$ such that
$$f(v, w) = \tilde{f}(v\otimes w).$$
Let us underline that $\tilde{f}$ is linear! This makes $\otimes$ a prototype bilinear function as any other bilinear function is a linear map of precisely this one.
Dimension
Let $V$ and $W$ be finite dimensional. We will show that
Dimension of tensor
$$\dim(V\otimes W) = \dim V \dim W.$$
Proof 1. To that end we use the fact that the dual vector space has the same dimension as the original vector space. That is, the dimension of $V\otimes W$ is the dimension of $(V\otimes W)^*.$
The space $(V\otimes W)^* = {\rm Hom}(V\otimes W, {\rm I\!R})$ is the space of bilinear maps $V\times W \to {\rm I\!R}$.
Suppose $V$ has the basis $\{e^V_1, \ldots, e^V_{n_V}\}$ and $W$ has the basis $\{e^W_1, \ldots, e^W_{n_W}\}$.
To form a basis for the space of bilinear maps $f:V\times W\to{\rm I\!R}$ we need to identify every such function with a sequence of scalars. We have
$$f(u, v) = f\left(\sum_{i=1}^{n_V}a^V_{i}e^V_{i}, \sum_{i=1}^{n_W}a^W_{i}e^W_{i}\right).$$
From the bilinearity of $f$ we have
$$f(u, v) = \sum_{i=1}^{n_V}\sum_{j=1}^{n_W} a^V_{i}a^W_{j} f(e^V_{i}, e^{W}_{j}).$$
The right hand side is a bilinear function and the coefficients $(a^V_i, a^W_j)$ suggest that the dimension if $n_V n_W$. $\Box$
Proof. This is due to [22]. We can write any $T \in V\otimes W$ as
$$T = \sum_{k=1}^{n}a_k \otimes b_k,$$
for $a_k\in V$ and $b_k\in W$ and some finite $n$. If we take bases $\{v_i\}_{i=1}^{n_V}$ and $\{w_i\}_{i=1}^{n_W}$ we can write
$$a_k = \sum_{i=1}^{n_V}\alpha_{ki}v_i,$$
and
$$b_k = \sum_{j=1}^{n_W}\beta_{kj}w_j,$$
therefore,
$$\begin{aligned}T {}={}& \sum_{i=1}^{n}\left(\sum_{i=1}^{n_V}\alpha_{ki}v_i\right) \otimes\left(\sum_{j=1}^{n_W}\beta_{kj}w_j\right) \\ {}={}& \sum_{i=1}^{n} \sum_{i=1}^{n_V} \sum_{j=1}^{n_W} \alpha_{ki}\beta_{kj} v_i\otimes w_j. \end{aligned}$$
This means that $\{v_i\otimes w_j\}$ is a basis of $V\otimes W$.
Tensor basis
In the finite-dimensional case, the basis of $V\otimes W$ can be constructed from the bases of $V$ and $W$, $\{e^V_1, \ldots, e^V_{n_V}\}$ and $\{e^W_1, \ldots, e^W_{n_W}\}$ as the set
$$\mathcal{B}_{V\otimes W} = \{e^V_i \otimes e^{W}_j, i=1,\ldots, n_V, j=1,\ldots, n_W\}.$$
This implies that
$$\dim (V\otimes W) = \dim V \dim W.$$
Tensor products of spaces of functions
We need first to define the function space $F(S)$ as in Kostrikin[2].
Let $S$ be any set. We define the set $F(S)$—we can denote it also as ${\rm Funct}(S, {\rm I\!R})$—as the set of all functions from $S$ to ${\rm I\!R}$. If $f\in F(S)$, then $f$ is a function $f:S\to{\rm I\!R}$ and $f(s)$ denotes the value at $s\in S$.
On $F(S)$ we define addition and scalar multiplication in a pointwise manner: For $f, g\in F(S)$ and $c\in {\rm I\!R}$,
$$\begin{aligned} (f+g)(s) {}={}& f(s) + g(s), \\ (cf)(s) {}={}& c f(s). \end{aligned}$$
This makes $F(S)$ into a vector space. Note that $S$ is not necessarily a vector space.
If $S = \{s_1, \ldots, s_n\}$ is a finite set, $F(S)$ can be identified with ${\rm I\!R}^n$. After all, for every $f\in F(S)$ all you need to know is $f(s_1), \ldots, f(s_n)$.
Every element $s\in S$ is associated with the delta function
$$\delta_{s}(\sigma) = \begin{cases} 1, &\text{ if } \sigma = s, \\ 0, &\text{ otherwise} \end{cases}$$
The function $\delta_s:S \to \{0,1\}$ is called Kronecker's delta.
If $S$ is finite, then every $f\in S$ can be written as
$$f = \sum_{s\in S} a_s \delta_s.$$
Let $S_1$ and $S_2$ be finite sets and let $F(S_1)$ and $F(S_2)$ be the corresponding function spaces. Then, there is a canonical identity of the form
$$\underbrace{F(\underbrace{S_1 \times S_2}_{\text{Finite set of pairs}})}_{\text{Has }\delta_{s_1, s_2}\text{ as basis}} = F(S_1) \otimes F(S_2),$$
which associates each function $\delta_{s_1, s_2}$ with $\delta_{s_1} \otimes \delta_{s_2}$.
If $f_1 \in F(S_1)$ and $f_2 \in F(S_2)$ then using the standard bases of $F(S_1)$ and $F(S_2)$
$$f_1 \otimes f_2 = \left(\sum_{s_1 \in S_1}f_1(s_1) \delta_{s_1}\right) \otimes \left(\sum_{s_1 \in S_2}f_2(s_2) \delta_{s_2}\right).$$
Isomorphism $(U\otimes V)^* \cong U^* \otimes V^*$.
We have the isomorphism of vector spaces $(U\otimes V)^* \cong U^* \otimes V^*$ with isomorphism map
$$\rho:U^* \otimes V^* \to (U\otimes V)^*,$$
where for $f\in U^*$ and $g\in V^*$,
$$\rho(f\otimes g)(u\otimes v) = f(u)g(v).$$
For short, we write $(f\otimes g)(u\otimes v) = f(u)g(v)$.
Roman [5] in Theorem 14.7 proves that $\rho$ is indeed an isomorphism.
Associativity
As Kostrikin notes [2], the spaces $(L_1\otimes L_2)\otimes L_3$ and $L_1 \otimes (L_2 \otimes L_3)$ do not coincide — they are spaces of different type. They, however, can be found to be isomorphic via a canonical isomorphism.
We will start by studying the relationship between $L_1 \otimes L_2 \otimes L_3$ and $(L_1 \otimes L_2) \otimes L_3$.
The mapping $L_1 \times L_2 \ni (l_1, l_2) \mapsto l_1 \otimes l_2 \in L_1 \otimes L_2$ is bilinear, so the mapping
$$L_1 \times L_2 \times L_2 \ni (l_1, l_2, l_3) \mapsto (l_1 \otimes l_2) \otimes l_2 \in (L_1 \otimes L_2) \otimes L_3$$
is trilinear, so it can be constructed via the unique linear map
$$L_1 \otimes L_2 \otimes L_3 \to (L_1 \otimes L_2) \otimes L_3,$$
that maps $l_1 \otimes l_2 \otimes l_3$ to $(l_1 \otimes l_2) \otimes l_3$. Using bases we can show that this map is an isomorphism.
Commutativity and the braiding map
See Wikipedia.
As a note, take $x = (x_1, x_2)$ and $y = (y_1, y_2)$. Then $x\otimes y$ and $y\otimes x$ look like
$$\begin{bmatrix}x_1y_1\\x_1y_2\\x_2y_1\\x_2y_2\end{bmatrix}, \begin{bmatrix}x_1y_1\\x_2y_1\\x_1y_2\\x_2y_2\end{bmatrix}$$
and we see that the two vectors contain the same elements in different order. In that sense,
$$V\otimes W \cong W \otimes V.$$
The corresponding map, $V\otimes V \ni v\otimes v' \mapsto v'\otimes v \in V\otimes V$ is called the braiding map and it induces an automorphism on $V\otimes V$.
Some key isomorphisms
Result 1: Linear maps as tensors
This is only true in the finite dimensional case.
To prove this we build a natural isomorphism
$$\Phi:V^*\otimes W \to {\rm Hom}(V, W),$$
by defining
$$\Phi(v^*\otimes w)(v) = v^*(v)w.$$
Note that $v^*\otimes w$ is a pure tensor. A general tensor has the form
$$\sum_i v_i^*\otimes w_i,$$
and
$$\Phi\left(\sum_i v_i^*\otimes w_i\right)(v) = \sum_i v_i^*(v)w_i.$$
This is a linear map. Linearity is easy to see. See also this video [6].
Here is the statement:
First isomorphism result: ${\rm Hom}(V, W) \cong V^* \otimes W$.
In the finite-dimensional case, we have that ${\rm Hom}(V, W) \cong V^* \otimes W$ holds with isomorphism $\phi \otimes w \mapsto (v \mapsto \phi(v)w).$
Proof. [10] The proposed map, $\phi \otimes w \mapsto (v \mapsto \phi(v)w)$, is a linear map $V^*\otimes W\to {\rm Hom}(V, W)$. We will construct its inverse (and prove that it is the inverse). Let $(e_i)_i$ be a basis for $V$. Let $(e_i^*)_i$ be the naturally induced basis of the dual vector space, $V^*$. We define the mapping
$$g:{\rm Hom}(V, W) \ni \phi \mapsto \sum_{i}e_i^* \otimes \phi(e_i) \in V^*\otimes W.$$
We claim that $g$ is the inverse of $\Phi$ which we already defined to be the map $V^*\otimes W \to {\rm Hom}(V, W)$ given by $\Phi(v^*\otimes w)(v) = v^*(v)w.$ Indeed, we see that
$$\begin{aligned} \Phi(g(\phi)) {}={}& \Phi\left(\sum_{i=1}^{n}e_i^* \otimes \phi(e_i)\right) &&\text{Definition of $g$} \\ {}={}& \sum_{i=1}^{n} \Phi\left(e_i^* \otimes \phi(e_i)\right) &&\text{$\Phi$ is linear} \\ {}={}& \sum_{i=1}^{n}e_i^*({}\cdot{})\phi(e_i) \\ {}={}& \phi\left(\underbrace{e_i^*({}\cdot{})e_i}_{{\rm id}}\right) && \text{$\phi$ is linear} \\ {}={}& \phi. \end{aligned}$$
Conversely,
$$\begin{aligned} g(\Phi(v^*\otimes w)) {}={}& g(v^*(\cdot)w) \\ {}={}& \sum_{i=1}^{n}e_i^* \otimes v^*(e_i)w \\ {}={}& \left(\sum_{i=1}^{n}e_i^* v^*(e_i)\right) \otimes w \\ {}={}& v^*\otimes w. \end{aligned}$$
This completes the proof. $\Box$
Result 2: Dual of space of linear maps
For two finite-dimensional spaces $V$ and $W$, it is
$$\begin{aligned} {\rm Hom}(V, W)^* {}\cong{} (V^*\otimes W)^* {}\cong{} V^{**}\otimes W^* {}\cong{} V\otimes W^* {}\cong{} {\rm Hom}(W, V). \end{aligned}$$
It is ${\rm Hom}(V, W)^* {}\cong{} {\rm Hom}(W, V).$
Some additional consequences of this are:
- ${\rm Hom}({\rm Hom}(V,W),U) \cong {\rm Hom}(V,W)^*\otimes U \cong (V^*\otimes W)^*\otimes U \cong V\otimes W^* \otimes U.$
- $U\otimes V \otimes W \cong {\rm Hom}(U^*, V)\otimes W \cong {\rm Hom}({\rm Hom}(V,U^*),W)$
- $V\otimes V^* \cong {\rm Hom}(V^*, V) \cong {\rm Hom}(V,V)$, where if $V$ is finite dimensional, $V^*\cong V$, so we see that $V^*\otimes V \cong {\rm End}(V)$
Question: How can we describe linear maps from ${\rm I\!R}^{m\times n}$ to ${\rm I\!R}^{p\times q}$ with sensors?
We are talking about the space ${\rm Hom}({\rm I\!R}^{m\times n}, {\rm I\!R}^{p\times q})$, but every matrix $A$ can be identified by the linear map $x\mapsto Ax$, so ${\rm I\!R}^{m\times n}\cong {\rm Hom}({\rm I\!R}^{n}, {\rm I\!R}^{m})$, so
$$\begin{aligned} {\rm Hom}({\rm I\!R}^{m\times n}, {\rm I\!R}^{p\times q}) {}\cong{}& {\rm Hom}({\rm Hom}({\rm I\!R}^n, {\rm I\!R}^m), {\rm Hom}({\rm I\!R}^q, {\rm I\!R}^p)) \\ {}\cong{}& (({\rm I\!R}^n)^*\otimes {\rm I\!R}^m)^* \otimes ({\rm I\!R}^{q})^*\otimes {\rm I\!R}^p \\ {}\cong{}& {\rm I\!R}^n \otimes {\rm I\!R}^{m*} \otimes {\rm I\!R}^{q*} \otimes {\rm I\!R}^p \end{aligned}$$
Such objects can be seen as multilinear maps ${\rm I\!R}^{n*} \times {\rm I\!R}^{m} \times {\rm I\!R}^{q} \times {\rm I\!R}^{p*} \to {\rm I\!R}$ , that is,
$$(x\otimes \phi \otimes \psi \otimes y)(\theta, s, t, \zeta) = \theta(x)\phi(s)\psi(t)\zeta(y).$$
Lastly,
$$\dim {\rm Hom}({\rm I\!R}^{m\times n}, {\rm I\!R}^{p\times q}) = \dim {\rm I\!R}^n \otimes {\rm I\!R}^{m*} \otimes {\rm I\!R}^{q*} \otimes {\rm I\!R}^p = nmpq.$$
Result 3: Tensor product of linear maps
Tensor product of linear maps. Let $U_1, U_2$ and $V_1, V_2$ be vector spaces. Then
$${\rm Hom}(U_1, U_2) \otimes {\rm Hom}(V_1, V_2) \cong {\rm Hom}(U_1\otimes V_1, U_2\otimes V_2)$$
with isomorphism function
$$(\phi\otimes\psi)(u\otimes v) = \phi(u) \otimes \psi(v).$$
Again, using the universal property
We can define $V\otimes W$ to be the a space accompanied by a bilinear operation $\otimes: V\times W \to V \otimes W$ that has the universal property in the following sense: [5]
Universal property. If $f: V\times W \to Z$ is a bilinear function, then there is a unique linear function $\tilde{f}: V\otimes Z$ such that $f = \tilde{f} \circ \otimes$.
The universal property says that every bilinear map $f(u, v)$ on a vector space $V$ is a linear function $\tilde{f}$ of the tensor product, $\tilde{f}(u\otimes v)$ [6].
See more about the uniqueness of tensor product via the universality-based definition as well as[8].
Making sense of tensors using polynomials
This is based on[9]. We can identify vectors $u=(u_0, \ldots, u_{n-1})\in{\rm I\!R}^n$ and $v\in{\rm I\!R}^m$ as polynomials over ${\rm I\!R}$ of the form
$$u(x) = u_0 + u_1x + \ldots + u_{n-1}x^{n-1}.$$
We know that a pair of vectors lives in the Cartesian product space ${\rm I\!R}^n\times {\rm I\!R}^m$. A pair of polynomials lives in a space with basis
$$\mathcal{B}_{\rm prod} {}\coloneqq{} \{(1, 0), (x, 0), \ldots, (x^{n-1}, 0)\} \cup \{(0, 1), (0, y), \ldots, (0, y^{n-1})\}.$$
But take now two polynomials $u$ and $v$ and multiply them to get
$$u(x)v(y) = \sum_{i}\sum_{j}c_{ij}x^iy^j.$$
The result is a polynomial of two variables, $x$ and $y$. This corresponds to the tensor product of $u$ and $v$.
Further reading
Lots of books on tensors for physicists are in [11]. In Linear Algebra Done Wrong [12] there is an extensive chapter on the matter. It would be interesting to read about tensor norms [13]. These lecture notes [14] [15] [16] seem worth studying too. These [18] lectures notes on multilinear algebra look good, but are more theoretical and look a bit category-theoretical. A must-read book is [19] and these lectures notes for MIT [20]. A book that seems to explain things in an accessible way, yet rigorously is [21].
References
- F. Schuller, Video lecture 3, Accessed on 12 Sept 2023.
- А. И. Кострикин, Ю.И.Манин, Линейная алгебра и геометрия, Часть 4
- Wikipedia, tensor product on Wikipedia, Accessed on 15 Sept 2023.
- P. Renteln, Manifolds, Tensors, and Forms: An introduction for mathematicians and physicists, Cambridge University Press, 2014.
- Steven Roman, Advanced Linear Algebra, Springer, 3rd Edition, 2010
- Check out this guy on YouTube (@mlbaker) gives a cool construction and explanation of tensors
- M. Penn's video "What is a tensor anyway?? (from a mathematician)" on YouTube
- Proof: Uniqueness of the Tensor Product, YouTube video by Mu Prime Math
- Prof Macauley on YouTube, Advanced Linear Algebra, Lecture 3.7: Tensors, accessed on 9 November 2023; see also his slides, Lecture 3.7: Tensors, lecture slides on tensors, some nice diagrams and insights.
- Answer on MSE on why ${\rm Hom}(V, W)$ is the same thing as $V^*\otimes W$, accessed on 9 November 2023
- Lots of books on tensors, tensor calculus, and applications to physics can be found on this GitHub repo, accessed on 9 November 2023
- S. Treil, Linear algebra done wrong, Chapter 8: dual spaces and tensors, 2017
- A. Defant and K. Floret, Tensor norms and operator ideals (link), North Holand, 1993
- K. Purbhoo, Notes on Tensor Products and the Exterior Algebra for Math 245, link
- Lecture notes on tensors, Uni Berkeley, link
- J. Zintl, Notes on tensor products, part 3, link
- Rich Schwartz, Notes on tensor products
- J. Zintl, Notes on multilinear maps, link
- A Iozzi, Multilinear Algebra and Applications. Concise (100 pages), very clear explanation.
- MIT Multilinear algebra lecture notes/book, multilinear algebra, introduction (dual spaces, quotients), tensors, the pullback operation, alternating tensors, the space $\Lambda^k(V^*)$, the wedge product, the interior product, orientations, and more 👍 (must read)
- JR Ruiz-Tolosa and E Castillo, From vectors to tensors, Springer, Universitext, 2005.
- Elias Erdtman, Carl Jonsson, Tensor Rank, Applied Mathematics, Linkopings Universite, 2012